在當今汽車電子架構日益復雜的背景下,車載網絡通信技術扮演著神經系統的關鍵角色。其中,控制器局域網(Controller Area Network, CAN)總線技術自誕生以來,歷經數十年發展,已成為汽車內部電子控制單元(ECU)之間通信的絕對主流和基石。本文旨在系統性地解析汽車級CAN總線通信技術的核心原理、協議架構、性能特點及其在現代智能汽車中的演進與挑戰。
一、 CAN總線技術概述:誕生與核心理念
CAN總線由德國博世公司于1980年代為解決汽車中日益增多的ECU之間的通信問題而開發。其核心理念是構建一個多主、廣播式、事件驅動的串行通信網絡。與傳統的點對點布線相比,CAN總線通過一對雙絞線將所有節點并聯,極大地簡化了線束,降低了成本、重量和復雜度,同時提高了系統的可靠性與可擴展性。
二、 核心技術原理深度解析
- 物理層與電氣特性:
- 總線介質:通常采用屏蔽或非屏蔽雙絞線,具有出色的抗電磁干擾能力。
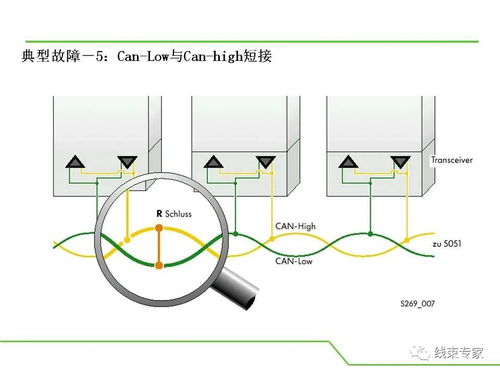
- 信號表示:采用“差分信號”傳輸。總線上的邏輯狀態通過CANH和CANL兩條線之間的電壓差來定義(如顯性電平“0”電壓差約2V,隱性電平“1”電壓差約0V)。這種設計對共模干擾有極強的抑制能力。
- 終端電阻:總線兩端必須各接一個120歐姆的終端電阻,用于阻抗匹配,消除信號反射,保證信號完整性。
- 數據鏈路層:協議的精髓
- 報文(幀)結構:CAN通信的基本單位是“幀”。關鍵幀類型包括:
- 數據幀:用于節點發送數據,包含仲裁場、控制場、數據場(最多8字節)、CRC校驗場等。
- 遠程幀:用于請求發送具有相同標識符的數據幀。
- 錯誤幀與過載幀:用于錯誤處理和流量控制。
- 非破壞性逐位仲裁:這是CAN總線實現多主競爭的核心機制。當多個節點同時發送時,它們從報文標識符(ID)的最高位開始逐位比對。發送顯性位(0)的節點將覆蓋隱性位(1)。ID數值越小(二進制表示前導0越多),優先級越高。競爭中失利的節點會自動轉為接收模式,稍后重試,沒有任何數據損壞或時間損失。
- 可靠的錯誤檢測與處理:CAN協議設計了包括CRC校驗、位填充、幀格式檢查、應答錯誤在內的多層錯誤檢測機制。每個節點都具備錯誤計數器,可根據錯誤嚴重程度進入“錯誤主動”、“錯誤被動”或“總線關閉”狀態,確保單個節點的故障不會導致整個網絡癱瘓,體現了極高的魯棒性。
三、 汽車級CAN的特殊要求與分類
“汽車級”意味著需要滿足嚴苛的車規標準(如AEC-Q100, ISO 16750等),具備:
- 寬工作溫度范圍(如-40°C 至 125°C)。
- 極高的抗電磁干擾(EMI)和電磁兼容性(EMC)。
- 長期的可靠性與穩定性。
在汽車中,根據實時性和帶寬需求,CAN網絡通常分為兩類:
- 高速CAN:速率最高可達1 Mbps,常用于對實時性要求高的動力總成系統(發動機、變速箱控制)、底盤控制(ABS、ESP)等。
- 低速/容錯CAN:速率通常在125 Kbps以下,具有更強的故障容錯能力(如單線工作模式),常用于車身舒適系統(門窗、燈光、空調等)。
四、 經典CAN與CAN FD:演進與增強
隨著汽車功能增加,傳統CAN(經典CAN)最大8字節數據場和1Mbps的帶寬已顯不足。為此,博世推出了CAN FD(Flexible Data-Rate)。
- 核心增強:
- 可變速率:在仲裁階段使用標準波特率,在數據階段切換至更高的波特率(最高可達5Mbps甚至更高)。
- 擴展數據場:數據場長度從8字節擴展至最多64字節,顯著提高了單幀數據的傳輸效率,減少了協議開銷。
- 更優的CRC校驗:采用更長的多項式,提升高速傳輸下的錯誤檢測能力。
- 應用:CAN FD正逐步在對帶寬有更高需求的域控制器間通信、高級駕駛輔助系統(ADAS)、車載診斷(OBD)等領域替代經典CAN。
五、 在現代汽車電子架構中的位置與挑戰
在面向“軟件定義汽車”的集中式域控或中央計算架構中,CAN總線并未被淘汰,而是找到了新的定位:
- 作為子網:在區域控制器或域控制器內部,CAN仍是連接大量傳感器、執行器和低復雜度ECU的高性價比、高可靠性選擇。
- 與以太網共存:車載以太網憑借超高帶寬(百兆/千兆)成為骨干網首選,負責域間高速通信。而CAN則作為其有效補充,在實時控制、可靠性和成本敏感的局部網絡中繼續發揮不可替代的作用,二者通過網關進行協議轉換與信息路由。
六、
汽車級CAN總線技術以其卓越的實時性、驚人的可靠性和極高的性價比,奠定了現代汽車電子網絡的基石。從經典CAN到CAN FD的演進,展現了其強大的生命力。盡管面臨更高帶寬需求的挑戰,但在可預見的CAN及其演進技術仍將與新興的以太網等技術深度融合,共同構建更智能、更安全、更復雜的汽車神經網絡,繼續驅動汽車工業的革新。理解CAN,是理解汽車電子通信不可或缺的一課。